Stanowisko do badania mechanizmów roboczych mini koparki CAT 301.5

Charakterystyka stanowiska, parametry
Koparka CAT 301.5 firmy Caterpillar z silnikiem spalinowym o mocy 14,1 kW i pojemności łyżki 0,45 m3. Istnieje możliwość zamontowania innego osprzętu stosowanego na współczesnych koparkach. Na maszynie zainstalowane są przetworniki ciśnienia, temperatury, przemieszczenia, kąta obrotu, prędkości obrotowej, współpracujące z aparaturą kontrolno-pomiarową bazującą na komputerze z kartą analogowo-cyfrową i PLC połączonym z panelem HMI.Badania
Koparka CAT 301.5 umożliwia pełne badania wszystkich napędów ze szczególnym uwzględnieniem napędu hydraulicznego i opartych na nim mechanizmów. Doskonalenie systemu sterowania zarówno z wykorzystaniem klasycznych elementów hydraulicznych jak i nowoczesnych elementów elektrohydraulicznych pozwala na optymalizację pracy maszyny z uwzględnieniem m.in. zastosowanego, w charakterze czynnika roboczego, oleju biodegradowalnego, poprawy pracy elementów układu, odzysku energii w układzie hydraulicznym czy też zadań stawianych układom napędu i sterowania współczesnych maszyn wtym systemów wspierających prace operatora.Dydaktyka
Stanowisko wykorzystywane w ramach przedmiotów Sterowanie i napęd hydrauliczny i pneumatyczny, Hydrotroniczne układy sterowania i Diagnostyka i monitoring maszyn. Celem ćwiczenia jest zapoznanie się z ogólną budową koparki oraz zasadą działania poszczególnych mechanizmów koparki takich jak: mechanizm jazdy, mechanizm obrotu, mechanizm lemiesza, mechanizm ramienia i mechanizm wysięgu. Rejestracja parametrów pracy układów prowadzona jest z wykorzystaniem komputerowych systemów pomiarowych pozwalających na przetworzenie mierzonych sygnałów analogowych na sygnały cyfrowe i automatyczną akwizycją danych. Na podstawie opracowanych danych pomiarowych wyznacza się wartości m.in. takich parametrów jak: moc na wyjściu z pompy, zredukowany moment bezwładności, siły uciągu, sprawność mechanizmu napędu jazdy oraz siły na poszczególnych siłownikach. Monitorowane są kluczowe parametry układu kinematycznego maszyny co pozwala implementować systemy śledzenia osprzętu roboczego lub systemy ważąco-ostrzegawcze.Stanowisko do badania elektrohydraulicznych układów sterowania mechanizmów maszyn roboczych

Charakterystyka stanowiska, parametry
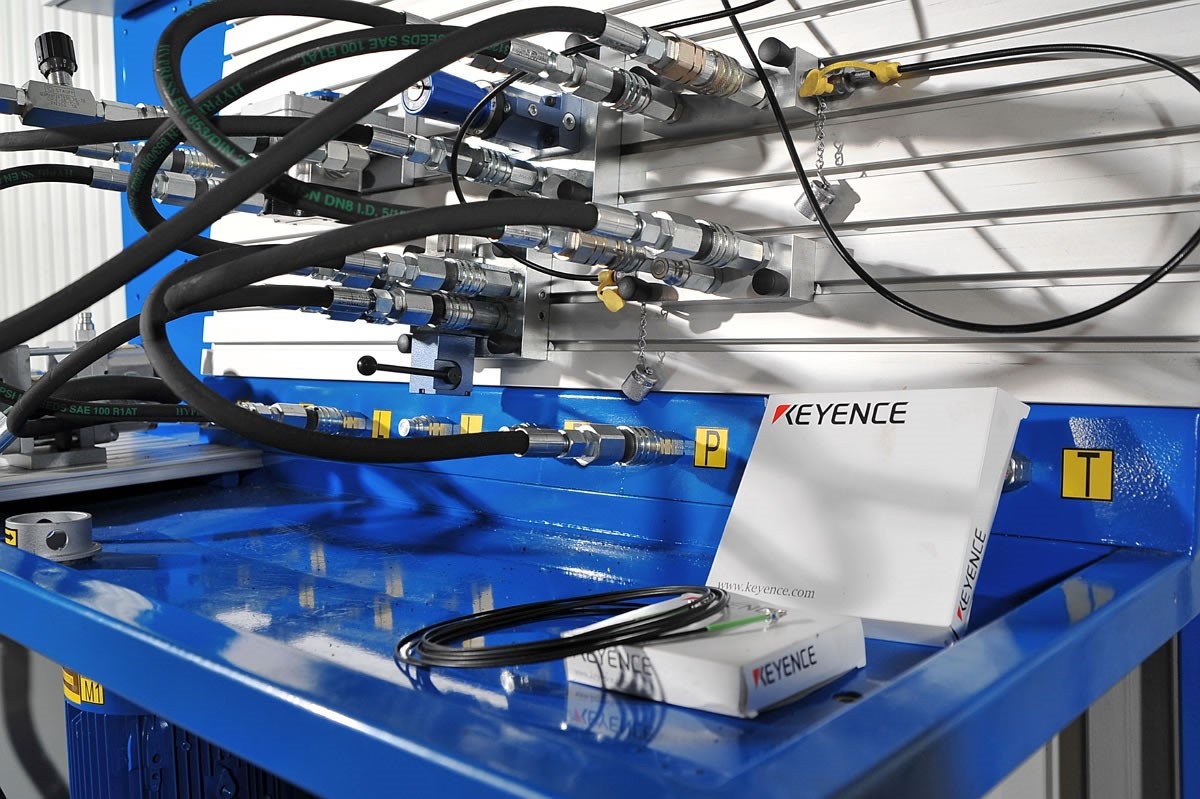
Stanowisko powstało w ramach projektów badawczych realizowanych dla firmy Caterpillar. Do jego budowy wykorzystano elementy mechanizmu wysięgu i ramienia oraz sterowania hydraulicznego. Układ wyposażono m.in. w podwójna pompę hydrauliczną wielotłoczkową o wydatku 46 cm3/obr każda i analogowym proporcjonalnym sterowaniu wydajnością i ciśnieniem. Dodatkowo układ został wyposażony w czujniki do pomiaru ciśnienia, temperatury, przemieszczenia, siły, kąta obrotu.Badania
Stanowisko umożliwia pełne badania wszystkich elementów wchodzących w skład osprzętu koparki. Możliwa jest zmiana konfiguracji elementów układu hydraulicznego, co umożliwia przetestowanie innych rozwiązań systemu sterowania zarówno z wykorzystaniem klasycznych elementów hydraulicznych jak i nowoczesnych elementów elektrohydraulicznych. Pozwala to na optymalizację pracy maszyny. Jest wykorzystywane w badaniach mających określić wartości sił, ciśnień i zapotrzebowanie mocy na podstawie prób symulujących obciążenie podczas rzeczywistych warunków pracy maszyny.Dydaktyka
Stanowisko może być wykorzystane w dydaktyce w ramach przedmiotów Sterowanie i napęd hydrauliczny i pneumatyczny oraz Hydrotroniczne układy sterowania, w szczególności przy wykonywaniu prac dyplomowych o charakterze badawczym.Stanowisko do badania układu sterowania manipulatorem wykorzystującym wodę jako czynnik roboczy

Charakterystyka stanowiska, parametry
Realizując cel rozszerzenia zastosowania hydraulicznych napędów wodnych na maszyny robocze i budowlane, stanowisko posiada układ kinematyczny charakterystyczny dla typowych manipulatorów budowlanych. Do jego budowy wykorzystano głównie elementy wodnej hydrauliki siłowej z programu Nessie® firmy Danfoss. Elementy hydraulicznego układu zasilania mogą pracować w zakresie ciśnienia do 14 MPa. Napęd pompy zrealizowany został poprzez trójfazowy asynchroniczny silnik indukcyjny o mocy 4 kW, który w połączeniu z falownikiem umożliwia płynną zmianę prędkości obrotowej pompy w zakresie od 750 ÷ 1500 obr/min i uzyskanie wydajności rzędu 8.6 ÷ 17.2 l/min.Badania
Główny nacisk w badaniach jest kładziony na testowanie zarówno poszczególnych elementów hydrauliki wodnej nowej generacji jak i kompleksowych układów hydraulicznych w zastosowaniach stacjonarnych. Jednym z celów badań jest budowa systemów sterowania układami hydraulicznymi zasilanymi wodą wodociągową. Mając na uwadze obecne możliwości systemów teleinformatycznych podjęto również próby wykorzystania zdalnego sterowania ruchami manipulatora poprzez sieć komputerową przewodową jak i bezprzewodową z jednoczesnym podglądem pola pracy przy użyciu kamer cyfrowych.Dydaktyka
Stanowisko wykorzystywane jest w ramach przedmiotów Sterowanie i napęd hydrauliczny i pneumatyczny oraz Hydrotroniczne układy sterowania. W trakcie zajęć studenci informowani są nowych trendach w układach hydraulicznych, propagujących ekologiczne napędy hydrauliczne. Uczestnicy laboratorium zapoznają się z elementami składowymi wodnego układu napędowego manipulatora i wyznaczają ich podstawowe charakterystyki. Budowane są układy sterownia pozwalające z wykorzystaniem oprogramowania, kontrolować stanowisko. Zainstalowane w układzie czujniki i aparatura badawcza umożliwiają pomiar i analizę podstawowych parametrów pracy manipulatora.Stanowisko do wyznaczania sprawności pompy wyporowej

Charakterystyka stanowiska, parametry
Stanowisko badawcze zbudowane jest z zębatej pompy hydraulicznej, z zaworu dławiącego symulującego obciążenie zewnętrzne, zaworu bezpieczeństwa, zabezpieczającego układ hydrauliczny przed obciążeniem, elektrycznego silnika napędowego. Elementy hydraulicznego układu zasilania mogą pracować w zakresie ciśnienia do 13 MPa. Napęd pompy zrealizowany został poprzez trójfazowy asynchroniczny silnik indukcyjny o mocy 15 kW, który w połączeniu z falownikiem umożliwia płynną zmianę prędkości obrotowej pompy w zakresie od 850 ÷ 1500 obr/min i uzyskanie wydajności rzędu 25 ÷ 45 l/min. Układ pomiarowy składa się z czujnika ciśnienia, miernika natężenia przepływu, miernika prędkości obrotowej i monetu oraz pomiaru temperatury.Badania
Stanowisko służy do zapoznania się z rodzajami, budową i zasadą działania wybranych pomp hydraulicznych oraz głównymi parametrami pracy. Dzięki budowie stanowiska można określić wpływ obciążenia, temperatury czynnika roboczego czy prędkości obrotowej na pracę pompy. Stanowisko umożliwia poznanie metod wyznaczenie szczegółowych charakterystyk sprawnościowych pomp hydraulicznych.Dydaktyka
Stanowisko wykorzystywane w ramach przedmiotów Napęd i sterowanie hydrauliczne i pneumatyczne. Celem ćwiczenia jest dokonanie pomiaru ciśnienia, momentu obrotowego, natężenia przepływu i prędkości obrotowej, a następnie wyznaczenie parametrów pracy pompy wyporowej. Na podstawie opracowanych danych pomiarowych wyznacza się wartości m.in. takich parametrów jak: sprawność w funkcji prędkości obrotowej i ciśnienia. Dodatkowo można zweryfikować poprawność doboru pomp hydraulicznych, w tym obliczeń projektowych, z wykorzystaniem kart katalogowych wybranych producentów elementów hydrauliki siłowejStanowisko do badania właściwości sterowania dławieniowego

Charakterystyka stanowiska, parametry
Stanowisko do badań charakterystyk sterowania dławieniowego wyposażone jest w pompę hydrauliczną stanowiącą generator wydatku, silnik hydrauliczny stanowiący element wykonawczy, pompę regulator przepływu i zawór dławiący. Elementy hydraulicznego układu zasilania mogą pracować w zakresie ciśnienia do 10 MPa. Napęd pompy zrealizowany został poprzez trójfazowy asynchroniczny silnik indukcyjny o mocy 2,2 kW, który w połączeniu z falownikiem umożliwia płynną zmianę prędkości obrotowej pompy w zakresie od 850 ÷ 1500 obr/min i uzyskanie wydajności rzędu 9 ÷ 15 l/min.Badania
Stanowisko służy do zapoznania się z podstawowymi układami sterowania prędkością obrotową silników hydraulicznych jakimi składy sterowania i regulacji dławieniowe. Dzięki wykorzystaniu szybkozłączy można łatwo montować i zmieniać konfiguracje układów w celu lepszego poznania ich działania i określenia wpływu czynników hydraulicznych czy mechanicznych na pracę danych układów i/lub poszczególnych wchodzących w ich skład elementów.Dydaktyka
Stanowisko wykorzystywane jest w ramach przedmiotów Sterowanie i Napęd Hydrauliczny i Pneumatyczny oraz Energooszczędne i Ekologiczne Układy Napędy i Sterowania. Zapoznanie się z budową, zasadą działania układu sterowania dławieniowego szeregowego i równoległego, oraz ze sposobem podłączenia elementów hydraulicznych w tego typie sterowaniu. Określenie strat strukturalnych sterowania dławieniowego. Umiejętność łączenia elementów hydraulicznych w celu oceny i testów wybranych układów ze sterowaniem dławieniowym.Stanowisko do badań właściwości hydraulicznych napędów o ruchu liniowym i obrotowym

Charakterystyka stanowiska, parametry
Podstawę stanowiska stanowi aluminiowa konstrukcja wykonana z profili aluminiowych z ramką na siatkę stalową umożliwiającą mocowanie na niej elementów hydraulicznych i budowę układów. Stanowisko wyposażone jest m.in. w dwa cylindry hydrauliczne zespolone mechaniczne w układzie przeciwsobnym, dwa cylindry hydrauliczne, akumulator hydrauliczny o pojemności 1 litra naładowany ciśnieniem 30 bar wyposażony w blok bezpieczeństwa, dwa zestawy hydrauliczne z silnikami zębatymi. zestaw hydrauliczny pompa-silnik z silnikiem tłoczkowym. Zestaw do badania silników zawiera dwa silniki hydrauliczne, mocowania silników oraz sprzęgła z naklejonym paskiem wzbudnika czujnik prędkości obrotowej. Szafa sterująca umożliwia zasilenie elementów sterujących badanych obiektów. Stanowisko może być zasilane z pompy o stałej lub pompy o zmiennej wydajności generujący natężanie przepływu rzędu 60 l/min. Elementy hydraulicznego mogą pracować w zakresie ciśnienia do 20 MPa.Badania
System diagnostyczno-pomiarowy będący częścią stanowiska umożliwia pomiar natężenia przepływu, temperatury medium roboczego oraz ciśnienia w tym samym czasie. Przepływomierz montowany bezpośrednio na przewodach hydraulicznych poprzez zastosowanie szybkozłączek zintegrowany jest z panelem operatorskim, który pozwala na wyświetlanie oraz analizowanie mierzonych wielkości. Stanowisko wykorzystując klasyczne elementy hydrauliczne jak i nowoczesne elementy elektrohydrauliczne umożliwia prowadzenie szerokiej gamy badań i testów pojedynczych elementów oraz całych układów napędu i sterownia hydraulicznego.Dydaktyka
Stanowisko wykorzystywane jest w ramach przedmiotów Sterowanie i Napęd Hydrauliczny i Pneumatyczny oraz Energooszczędne i Ekologiczne Układy Napędy i Sterowania. Celem ćwiczenia jest zapoznanie się z budową i zasadą działania wybranych komponentów hydraulicznych wykorzystywanych do napędu liniowych elementów wykonawczych - siłowników hydraulicznych lub komponentów hydraulicznych wykorzystywanych do napędu obrotowych elementów wykonawczych – silniki hydrauliczne. Na stanowisku za pomocą komponentów hydraulicznych, łączonych ze sobą poprzez szybko złącza, realizowane są różne warianty układów hydraulicznych, na podstawie schematów oraz sprawdzana ich funkcjonalność.Stanowisko manipulatorów pneumatycznych sterowanych za pomocą sterownika PLC
Charakterystyka stanowiska, parametry
W skład stanowiska wchodzą dwa manipulatory pneumatyczne zbudowane z elementów, realizujących ruch liniowy i obrotowy, chwytaków oraz dwóch wysp zaworowych sterowanych elektrycznie napięciem 24V. Konwencjonalny układ sterowania zastąpiony został sterownikiem PLC z cyfrowymi modułami wyjścia i wejścia. Oprogramowanie zainstalowane na komputerze pozwala na stworzenie programu i przesłanie go do sterownika PLC oraz kontrolę sygnałów podczas pracy manipulatorów.Badania
Dalsza modernizacja układu manipulatorów, m.in. poprzez wprowadzenie czujników wysunięcia poszczególnych siłowników, pozwoli wykorzystać cały obszar przestrzeni roboczej obydwu manipulatorów. Dodatkowo wprowadzając regulacje zaworów dławiących można będzie sterować prędkościami ruchów poszczególnych modułów. Tego typu komponenty pozwolą na zbadanie problemu pozycjonowania złożonych systemów pneumatycznych.Dydaktyka
Stanowisko wykorzystywane w ramach przedmiotów Sterowanie i napęd hydrauliczny i pneumatyczny oraz hydrotroniczne układy sterowania. Umożliwia przedstawienie rzeczywistego układu dwóch manipulatorów pneumatycznych, których sterowanie realizowane jest za pomocą sterownika PLC. Student zapoznaje się: z budową układu pneumatycznego, jego komponentów, sposobu połączenia elementów pneumatycznych z sterownikiem, budową i zasadą działania PLC. Dodatkowo student rozwiązuje konkretny problem automatyki poprzez budowę programu w języku drabinkowym i jego weryfikację w sterowniku.Stanowisko do badania właściwości podstawowych i zaawansowanych układów pneumatycznych

Charakterystyka stanowiska, parametry
Stanowisko składa się z różnego typu elementów pneumatycznych i elektropneumatycznych takich jak jedno – i dwustronnego działania siłowniki pneumatyczne, siłownik beztłoczyskowy, eżektor i przyssawki pneumatyczne, zawory sterujące ciśnieniem i natężeniem przepływu, rozdzielacze 3/2, 5/2 i 5/3 sterowane mechanicznie, pneumatycznie i elektromagnetycznie. Dodatkowo w procesie starowania wykorzystane mogą być: czujniki położenia tłoka oraz przekaźniki elektryczne.Badania
Stanowisko pozwala na zapoznanie ze sterowaniem mechanicznym i pneumatycznym stosowanym w układach napędu pneumatycznego, rodzajami i budową zaworów pneumatycznych sterujących kierunkiem przepływu czynnika roboczego, z praktycznym pojęciem i zastosowaniem układów sekwencyjnych, zapewniających określoną kolejność działania siłowników pneumatycznych w trybie półautomatycznym i automatycznym, praktycznym wykorzystaniem wybranych elementów umożliwiających budowę podstawowych nieelektrycznych układów sterowania zależnych od drogi, czasu i wartości ciśnienia, wykonaniem cyklogramu pracy układu pneumatycznego, zapoznaniem się z praktycznym pojęciem i zastosowaniem układów z przekaźnikami czasowymi, poznanie typów przekaźników czasowych wraz z interpretacją graficzną formowania sygnałów pneumatycznych, budową przykładowych układów z przekaźnikami czasowymi i analizą ich pracy.Dydaktyka
Stanowisko wykorzystywane jest w ramach specjalistycznych przedmiotów dziedziny napędu i sterowania hydraulicznego i pneumatyczne a także przedmiotów podstawowych jak Maszynoznawstwo. Studenci mają możliwość zapoznania się z ideą, budową a przed wszystkim zasada działania różnorodnych układów i elementów pneumatycznych. Łatwa możliwość montażu i demontażu elementów i przewodów umożliwia szybkie budowanie i testowanie układów w oparciu o schematy czy samodzielne pomysły.Stanowisko do badań i diagnostyki wibroakustycznej pompy wielotłoczkowej

Charakterystyka stanowiska, parametry
Stanowisko pomiarowe składa się komory dźwiękochłonno-izolacyjnej wykonanej z elementów pochłaniających dźwięki (wełna mineralna) oraz elementów izolujących hałas zewnętrzny (wielowarstwowa płyta izolacyjna). Wewnątrz komory znajduje się tylko jeden element układu hydraulicznego (pompa wielotłoczkowa), izolowany od wpływów zewnętrznych zakłóceń akustycznych. W układzie hydraulicznym zainstalowano przepływomierz turbinkowy oraz czujnik ciśnienia w celu określenia parametrów hydraulicznych (wydatek pompy i ciśnienie hydrauliczne). Do określenia parametrów wibroakustycznych zostały wykorzystane: akcelerometr zainstalowany na korpusie pompy i mikrofon pomiarowy umieszczony w kabinie dźwiękochłonno-izolacyjnej. Sygnały z wszystkich czujników poddawane są przetwarzaniu, analizie i akwizycji przy wykorzystaniu metod DSP.Badania
Na stanowisku wykonywane są pomiary aktywności wibroakustycznej pompy wielotłoczkowej w funkcji jej parametrów pracy. Badanie pomp nieuszkodzonych oraz pomp z określonym typem uszkodzenia pozwala na jego diagnostykę i identyfikacje przy wykorzystaniu analizy sygnałów wibroakustycznych. Do diagnostyki wykorzystywane są różne typy analiz począwszy od obliczania prostych estymat sygnału, przez analizy w dziedzinie czasu (korelacji, obwiedni) i częstotliwości (widma) po analizy czasowo – częstotliwościowe.Dydaktyka
Stanowisko wykorzystywane jest w ramach przedmiotu Wibroakustyczne Diagnozowanie Maszyn. Pozwala na zapoznanie z problemem hałasu i drgań układów hydraulicznych. Studenci poznają zasady diagnostyki pomp opartą o analizę sygnału wibroakustycznego oraz pulsacji ciśnienia. W ramach zajęć studenci poznają metody analizy sygnału takie jak analiza obwiedni sygnału, analiza korelacyjna, analizy czasowo – częstotliwościowe.Stanowisko do pomiarów oraz analizy drgań i hałasu



Charakterystyka stanowiska, parametry
Stanowisko składa się z zestawu analizatorów i mierników poziomu dźwięku, analizatorów drgań wraz z mikrofonami pomiarowymi oraz zestawem akcelerometrów. W skład stanowiska wchodzi także oprogramowanie do zawansowanej analizy sygnałów wibroakustycznych. Do poprawnego działania systemu w jego skąłd wchodzi układ do kalibracji akustycznej oraz kalibracji drgań. Urządzenia wchodzące w skład stanowiska umożliwiają elastyczną zmianę konfiguracji pomiarowej pozwalając na dostosowanie jej do szerokiego zakresu zastosowań.Badania
Na stanowisku wykonywane są badania akustyczne przy wykorzystaniu różnych typów mierników i analizatorów poziomu dźwięku oraz pomiary i analizy drgań. Z uwagi na uniwersalność zastosowanych przyrządów pomiarowych mogą one być wykorzystywane do bardzo szerokiego zakresu problemów badawczych od określenia wpływu pola wibroakustycznego na człowieka, przez określanie różnych parametrów fizycznych (t.j. izolacyjność akustyczna, współczynnik wibroizolacji, parametry akustyczne pomieszczenia, itp.) na diagnostyce wibroakustycznej kończąc.Dydaktyka
Stanowisko wykorzystywane jest w ramach przedmiotu Wibroakustyczne Diagnozowanie Maszyn. Pozwala na zapoznanie się studentów w budową i zasadą działania mierników poziomu dźwięku, a także zapoznanie się z podstawowymi zasadami pomiarów z użyciem tych urządzeń. W trakcie ćwiczenia studenci dokonują pomiarów wybranych źródeł dźwięku, zaznajamiając się z funkcjami miernika i najczęstszymi błędami popełnianymi podczas pomiarów. Stanowisko pozwala także na zapoznanie się z budową i zasadą działania mierników drgań. W trakcie ćwiczenia określane są parametry czujników drgań, a także dokonywane są pomiary parametrów opisujących drgania (przemieszczenia, prędkości i przyspieszenia drgań), z uwzględnieniem relacji zachodzących między nimi. Dodatkowo, w dalszej kolejności w trakcie zajęć laboratoryjnych studenci zapoznawani są z różnymi metodami analizy sygnałów wibroakustycznych. Wykonywane są analizy w dziedzinie czasu i częstotliwości, z wykorzystaniem technik cyfrowego przetwarzania sygnałów.Stanowisko do diagnostyki wibroakustycznej wentylatorów promieniowych
Charakterystyka stanowiska, parametry
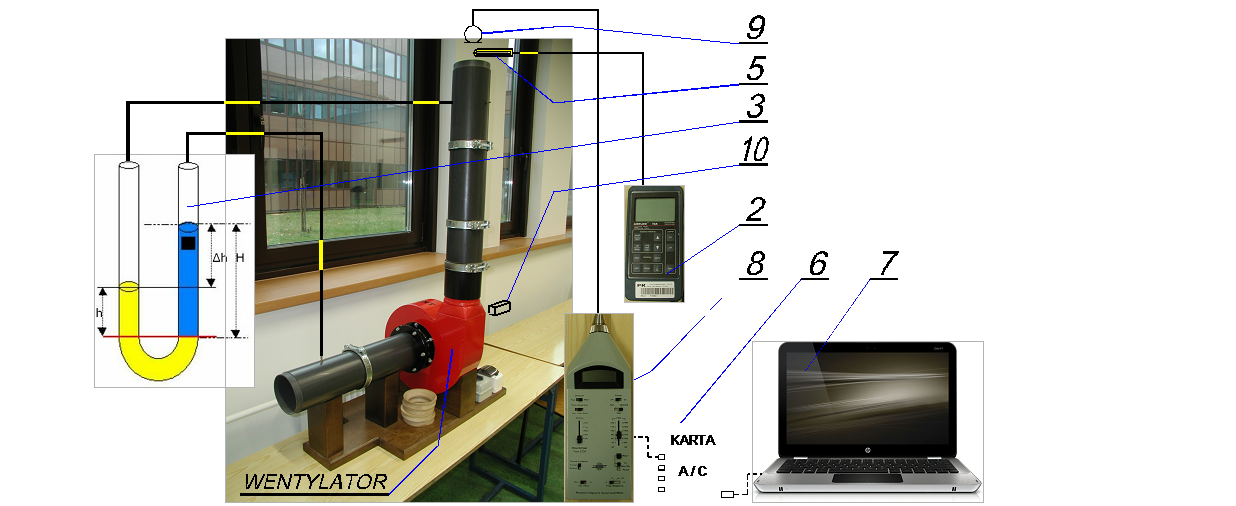
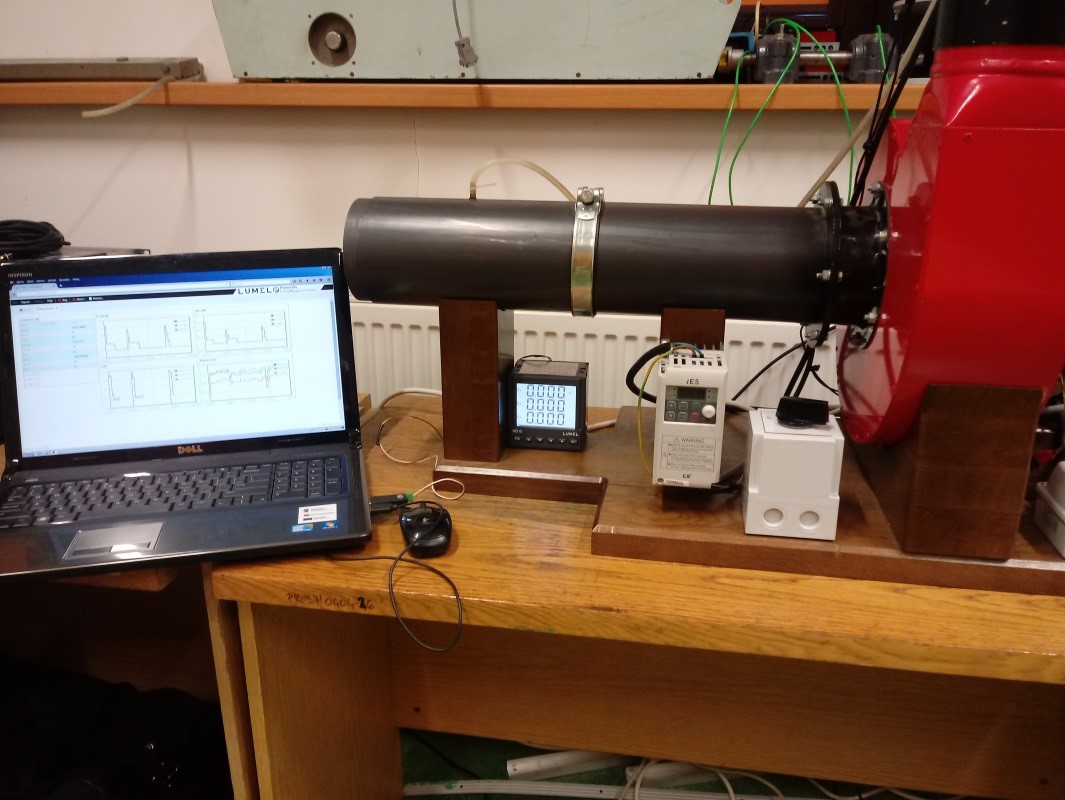
Stanowisko jest przeznaczone do badanie wpływu obciążenia wentylatora na wartość parametrów sygnału akustycznego wywołane praca urządzenia. Główne elementy badanego układu stanowią: badany wentylator z króćcami i elementami służącymi do dławienia przepływu wentylatora, oraz elementy toru pomiarowego. W skład toru pomiarowe wchodzą: precyzyjny miernik poziomu dźwięku (8) wraz z mikrofonem (9), manometr róznicowy (3) do pomiaru różnicy ciśnienia statycznego czynnika roboczego w kanałach dolotowym i wylotowym oraz termoanemometr (2) z sondą pomiarową (5). Sygnał z mikrofonu (9) jest przesyłany na kartę A/C (6) i dalej do komputera. Odczytane wartości z termoanemometru (2), tachometru (10) i manometru (3) są również wprowadzane do komputera. Mikrofon pomiarowy znajduje się na wysokości kanału wylotowego wentylatora. Przewody manometru różnicowego przymocowane są do króćców umieszczonych w kanałach zasilającym i wylotowym. Sonda termoanemometru umieszczona jest tuż nad kanałem wylotowym. Przy pomocy tachometru mierzone są obroty silnika napędu.Badania
Na stanowisku pokazywane są nowoczesne metody diagnostyki wentylatorów. Pozwala ono również na pokazanie powiazań pomiędzy stanem technicznym urządzenia i jego parametrami pracy przy różnym jego obciążeniu. Studenci w ramach zajęć oceniają wpływ obciążenia wentylatora na kształt widma hałasu i drgań wentylatora. Podczas pomiaru dokonywana jest analiza widmowa poziomu ciśnienia akustycznego mierzonego w pobliżu kanału wylotowego wentylatora, a także analiza drgań korpusu urządzenia. Pomiar jest wykonany dla zmiennego obciążenia wentylatora. W trakcie pomiaru rejestrowane są także inne parametry pracy wentylatora. Ćwiczenie pozwala na zaznajomienie się studentów z nowoczesnymi metodami diagnostyki urządzeń tego typu.Dydaktyka
Stanowisko wykorzystywane jest w ramach przedmiotu „Wibroakustyczne Diagnozowanie Maszyn” (studia II stopnia). Pozwala ono na zapoznanie się z nowoczesnymi metodami diagnozowania stanu urządzenia, gdzie głównie wykorzystywana jest analiza widmowa drgań i hałasu. W ramach zajęć studenci wykorzystują aparaturę pomiarową, która umożliwia określić stan urządzenia na podstawie analizy widmowej. Mogą również zaobserwować jak zmieniają się parametry pracy urządzenia (m.in. spadki ciśnienia czy prędkość przepływu) pod wpływem obciążenia układu, i powiązać określony zmiany z wynikiem analizy widmowej sygnału wibroakustycznego.System wibroakstyki maszyn wirnikowych VIBSTAND

Charakterystyka stanowiska, parametry
VIBSTAND jest kompletnym stanowiskiem badawczo - edukacyjnym do diagnostyki maszyn wirnikowych. Składa się z części mechanicznej oraz systemu monitoringu i diagnostyki. Część mechaniczna zamocowana na sztywnej podstawie składa się z falownika, silnika trójfazowego z reduktorem oraz wału podpartego w dwóch łożyskach tocznych. Na wale zamontowana jest tarcza z przygotowanymi gwintowanymi otworami do wkręcenia niewywagi. Część diagnostyczna to system diagnostyczny VIBex w pełnej wersji (Expert). System posiada 3 kanały drganiowe oraz 1 kanał znacznika fazy. Stanowisko wyposażono w 3 czujniki drgań, które mogą być zamocowane w jednym z 18 przygotowanych otworów, tak aby mierzyć drgania w wybranej płaszczyźnie na wybranych węzłach konstrukcyjnych.Badania
Stanowisko umożliwia analizę rzeczywistych sygnałów pochodzących z maszyny oraz naukę budowy i konfiguracji systemu diagnostycznego. Analiza sygnałów łożysk z których jedno jest celowo uszkodzone, drugie natomiast jest całkowicie sprawne, pozwala w przejrzysty sposób zaprezentować metody wykrywania uszkodzeń łożysk tocznych. Na stanowisku można badać zjawiska niewyważania oraz nieosiowości w maszynach wirnikowych, przeprowadzać diagnostykę wibroakustyczną przekładni zębatej. Stanowisko pozwala również na pomiar drgań strukturalnych maszyn. System diagnostyczny VIBex umożliwia rejestrację oraz diagnostykę stanu poprzez liczne wykresy (przebieg czasowy, widmo, widmo rzędnych, widmo obwiedni, trend, XY, kaskada, wykres synoptyczny, lista alarmów).Dydaktyka
Stanowisko wykorzystywane jest w ramach przedmiotów Wibroakustyczne Diagnozowanie Maszyn oraz Diagnostyka i Monitoring Maszyn. Pozwala na zapoznanie nowoczesnym systemem monitorowania i wibrodiagnostyki maszyn wirnikowych.. Studenci zapoznają się z szeregiem problemów pojawiających się z podczas pracy maszyn takich jak: uszkodzenia łożysk i ich diagnozowanie w oparciu o analizę widmową obwiedni drgań, diagnostyka przekładni zębatych w oparciu o pomiary drgań, wpływ nieosiowości na poziom i strukturę drgań, problem niewyważania maszyn wirnikowych. Studenci poznają zasadę działania i zalety analizy synchronicznej sygnałów. W ramach zajęć studenci mają również możliwość konfiguracji systemu monitorowania VIBEX (definiowanie kinematyki maszyny, obliczanie częstotliwości charakterystycznych, obliczanie estymat sygnału, definiowanie progów alarmowych).Zautomatyzowany system do pomiaru mocy akustycznej

Charakterystyka stanowiska, parametry
W skład systemu do pomiaru mocy akustycznej Sonopan APMS-19 wchodzą m.in.: multiplekser MPL-19, analizator dźwięku DSA-50, mikrofony pomiarowe, komputer z oprogramowaniem. Wyznaczanie mocy akustycznej jest wykonywane na podstawie jednoczesnego pomiaru ciśnienia akustycznego w 10 punktach pomiarowych. Mikrofony pomiarowe są rozmieszczone na statywach, na powierzchni półkuli otaczającej badany obiekt. Sygnały z mikrofonów poprzez multiplekser podawane są do cyfrowego analizatora dźwięku. Analizator oraz multiplekser sterowane są przez komputer sterujący (ze specjalistycznym oprogramowaniem), pozwalając na zautomatyzowanie pomiarów, obliczenie mocy akustycznej badanego obiektu i wygenerowanie raportu.Badania
System Sonopan APMS-19 umożliwia pomiar mocy akustycznej maszyn i urządzeń zgodnie z normą PN-EN 3744. Moc akustyczna jest podstawowym parametrem charakteryzującym aktywność akustyczną maszyny. Zasięg statywów pozwala na badania zarówno urządzeń o małych gabarytach jak i dużych maszyn budowlanych. Za pomocą systemu można również określić charakterystykę kierunkowości badanego źródła hałasu. System określa automatycznie poprawność kwalifikacji środowiska badawczego, ocenia spełnienie kryteriów określonych w normie (np. wpływ tła akustycznego), umożliwia również automatyczne przeprowadzenie kalibracji torów pomiarowych a także wizualizuje i archiwizuje dane pomiarowe. Pomiar jest wykonywany w sposób automatyczny.Dydaktyka
Stanowisko wykorzystywane jest w ramach przedmiotu Wibroakustyczne Diagnozowanie Maszyn. Pozwala na zapoznanie się z parametrami mocy akustycznej i kierunkowości źródeł hałasu a także właściwościami i problemami ich praktycznego pomiaru. Wielopunktowy pomiar poziomu dźwięku wykorzystywane jest także do identyfikacji najbardziej aktywnych akustycznie stref maszyny.Stanowisko do badania zagrożeń wibroakustycznych

Charakterystyka stanowiska, parametry
Stanowisko składa się z kabiny maszyny roboczej, w której zostały zainstalowane czujniki służące do pomiaru hałasu oraz drgań, służące do oceny zagrożeń wibroakustycznych na stanowisku pracy operatora. Mikrofon pomiarowy umieszczony jest w pobliżu ucha operatora i służy do pomiaru hałasu w kabinie. Czujniki drgań wbudowane w dysk pomiarowy znajdują się na fotelu operatora i służą do trójkierunkowego pomiaru drgań przekazywanych na ciało operatora. Sygnały z czujników przekazywane są na wejście karty przetwornika A/C a ich analiza wykonywana jest przy wykorzystaniu specjalistycznego oprogramowania (np. LabView).Badania
Stanowisko pozwala na przeprowadzenie oceny zagrożenia hałasem i wibracjami na w miejscu pracy. W czasie badań przy zadanych wymuszeniach zewnętrznych (hałas i drgania) wykonywany jest pomiar wartości równoważnego poziomu dźwięku A oraz dla każdego kierunku drgań obliczana jest średnia wartość ważona przyspieszenia drgań. Dodatkowo dla każdego z sygnałów wykonywa analiza 1/3-oktawowa. Wartości zmierzone porównywane są z dopuszczalnymi. Na stanowisku można dodatkowo przeprowadzić badania izolacyjności akustycznej kabiny metodą laboratoryjną przy wykorzystaniu zewnętrznych źródeł dźwięku.Dydaktyka
Stanowisko wykorzystywane w ramach przedmiotów Diagnostyka i Monitoring Maszyn oraz Wibroakustyczne Diagnozowanie Maszyn. W ramach zajęć dydaktycznych studenci mają możliwość zaznajomienia się z zasadą pomiaru i oceny zagrożeń wibroakustycznych na stanowisku operatora maszyn. Zapoznają się również z zasadą i wykonują badania izolacyjności akustycznej kabiny.Stanowisko do badania właściwości silnika asynchronicznego
Charakterystyka stanowiska, parametry
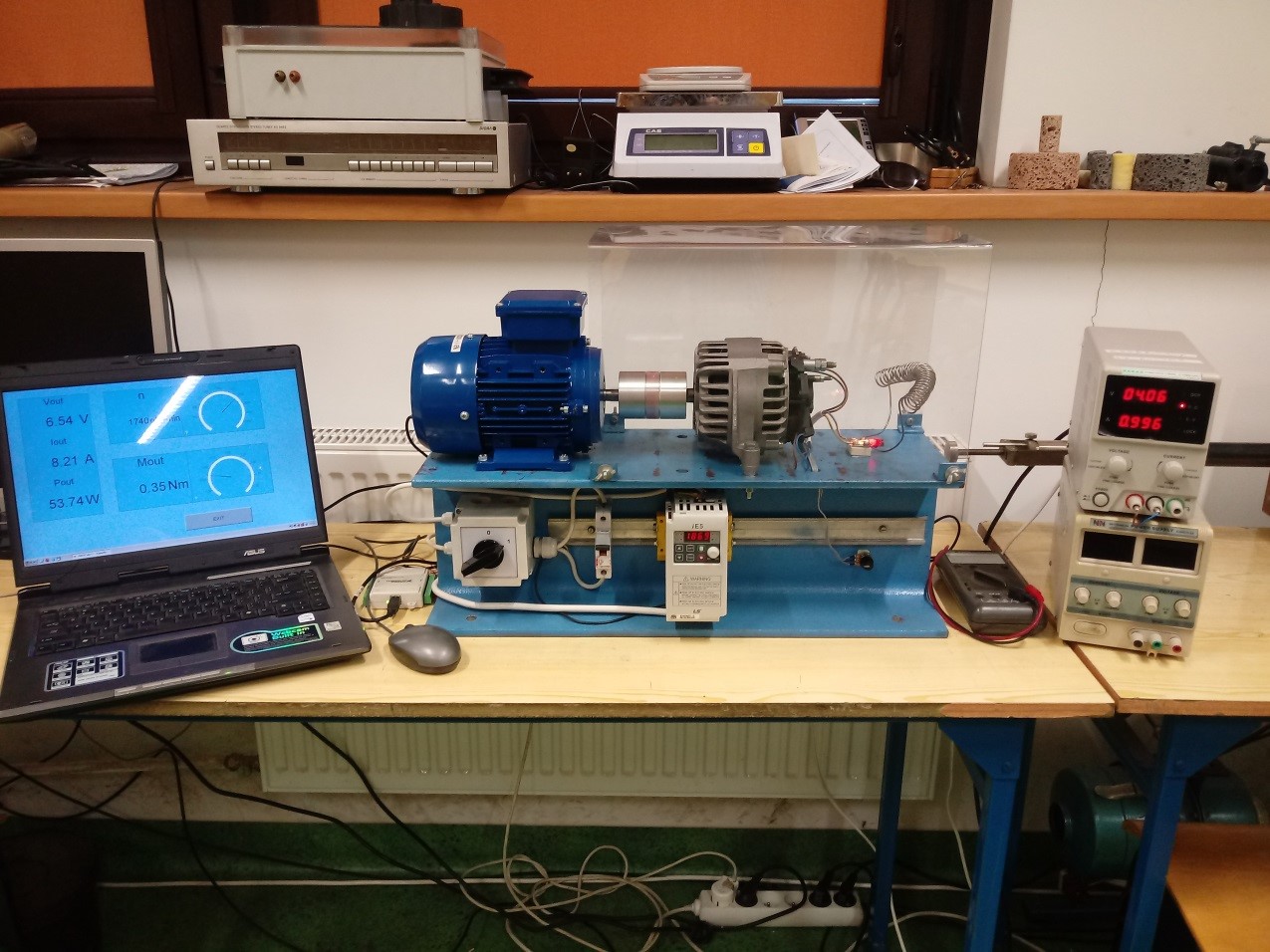
Stanowisko składa się z badanego silnika asynchronicznego trójfazowego do którego przy pomocy sprzęgła dołączony jest układ zadający moment obciążający. Zrealizowany jest on przy wykorzystaniu alternatora z regulowanym przy pomocy zasilacza prądem w obwodzie wzbudzenia. Taka regulacja pozwala na płynną zmianę momentu obciążenia. Wartość momentu jest obliczana ma podstawie pomiaru prądu i napięcia na wyjściu alternatora z uwzględnieniem strat w układzie przeniesienia napędu i sprawności alternatora. Parametry pracy silnika ustalane są przy wykorzystaniu falownika do jego zasilania. Do określenia obrotów silnika wykorzystywany jest czujnik hallotronowy. Druga cześć stanowiska to silnik asynchroniczny podłączony do zasilania poprzez miernik parametrów sieci i przełącznik gwiazda-trójkąt. Do pomiaru obrotów wykorzystywany jest czujnik hallotronowy.Badania
Stanowisko pozwala na przeprowadzenie pomiarów charakterystyk mechanicznych silnika asynchronicznego. Pramatry układu jak obroty silnika, napięcie i prąd wyjściowy z alternatora są mierzone przy wykorzystaniu przetwornika A/C a następnie przeliczane na moment obciążający. Rejestrowane są zmiany obrotów w funkcji momentu obciążenia co pozwala na wykreślenie charakterystyki mechanicznej oraz określenie parametrów krytycznych silnika. Wykorzystanie falownika pozwala na zmianę parametrów pracy silnika (obrotów, napięcia zasilania) i uzyskanie tym samym rodziny charakterystyk silnika obrazując wpływ parametrów napięcia zasilającego silnik. Drugie stanowisko pozwala na określenie prądów rozruchowych dla różnych konfiguracji połączeń (gwiazda – trójkąt) i różnych wartościach obciążenia silnika.Dydaktyka
Stanowisko wykorzystywane jest w ramach przedmiotu Napędy Elektryczne. W ramach zajęć dydaktycznych studenci mają możliwość zaznajomienia się z budową, prawidłowymi zasadami podłączeń i zabezpieczeń silnika oraz jego właściwościami. Określają charakterystyki silnika dla różnych parametrów zasilania (napięcie, częstotliwość). Studenci także dokonują pomiaru prądów przy rozruch silnika podłączonego w układ gwiazdy i trójkąta.Stanowisko do badania właściwości silnika prądu stałego

Charakterystyka stanowiska, parametry
Stanowisko składa się z badanego silnika prądu stałego (PMDC) EC180.24E do którego przy pomocy sprzęgła dołączony jest hamulec elektromagnetyczny P3HV. Moment hamujący hamulca elektromagnetycznego ustalany jest poprzez regulację prądu zasilania zgodnie z charakterystyką M=f(I) hamulca P3HV. Regulacja ta odbywa się przy pomocy zasilacza prądu stałego o regulowanej wydajności prądowej, co pozwala na płynną zmianę momentu obciążenia. W celu określenia prędkości obrotowej silnika stanowisko wyposażono w enkoder Me22-360 i przetwornik FU254.Badania
Stanowisko pozwala na przeprowadzenie pomiarów charakterystyk mechanicznych silnika prądu stałego. Parametry układu jak obroty silnika mierzone są przy wykorzystaniu przetwornika A/C, z kolei prąd pobierany przez silnik i wartość napięcia zasilania odczytywana jest z zasilacza DF1730 zasilającego silnik. Moment obciążający wyznaczany jest na podstawie pomiaru prądu hamulca elektromagnetycznego P3HV. Rejestrowane są zmiany obrotów w funkcji momentu obciążenia co pozwala na wykreślenie charakterystyki mechanicznej. Wykorzystanie zasilacza stabilizowanego o regulowanych parametrach pozwala na zmianę parametrów pracy silnika (obrotów, napięcia zasilania) i uzyskanie tym samym rodziny charakterystyk mechanicznych silnika.Dydaktyka
Stanowisko wykorzystywane jest w ramach przedmiotu Napędy Elektryczne. W ramach zajęć dydaktycznych studenci mają możliwość zaznajomienia się z budową, prawidłowymi zasadami podłączeń silnika oraz jego właściwościami. Określają charakterystyki mechaniczne silnika dla różnych parametrów zasilania.Stanowisko do badania właściwości silnika krokowego

Charakterystyka stanowiska, parametry
Stanowisko składa się z badanego bipolarnego silnika krokowego SM 57/76-3008B do którego przy pomocy sprzęgła dołączony jest hamulec elektromagnetyczny P3HV. Moment hamujący hamulca elektromagnetycznego ustalany jest poprzez regulację prądu zasilania zgodnie z charakterystyką M=f(I) hamulca P3HV. Regulacja ta odbywa się przy pomocy zasilacza prądu stałego o regulowanej wydajności prądowej, co pozwala na płynną zmianę momentu obciążenia. W celu określenia prędkości obrotowej silnika stanowisko wyposażono w enkoder i przetwornik FU254. Silnik krokowy zasilany jest przez driver SMC64V2, który pozwala na regulację parametrów takich jak podział krokowy, prąd fazowy, prąd spoczynkowy. Z kolei parametry takie jak prędkość obrotowa, czas rozpędzania i hamowania silnika krokowego zadawane są przy pomocy sterownika PLC Fatek FBS10-MC.Badania
Stanowisko pozwala na przeprowadzenie pomiarów charakterystyk mechanicznych silnika krokowego. Parametry układu jak obroty silnika mierzone są przy wykorzystaniu przetwornika A/C i enkodera, i porównywane są z parametrami zadanymi przez sterownik PLC. Dzięki płynnej regulacji nastawy prędkości obrotowej, studenci mają możliwość badania wpływu częstotliwości start/stopowej na pracę silnika. Ponadto zmiana momentu obciążenia realizowana przez hamulec elektromagnetyczny pozwala wyznaczyć charakterystykę mechaniczną w całym zakresie prędkości obrotowej silnika. Zastosowany driver SMC 64V2 umożliwia zbadanie wpływu podziału krokowego oraz wpływ podłączenia równoległego i szeregowego uzwojenia silnika na parametry pracy silnika krokowego.Dydaktyka
Stanowisko wykorzystywane jest w ramach przedmiotu Napędy Elektryczne. W ramach zajęć dydaktycznych studenci mają możliwość zaznajomienia się z budową, prawidłowymi zasadami podłączeń silnika, doboru odpowiedniego układu sterowania i zasilania oraz właściwościami badanego silnika krokowego.Układ kontroli poziomu cieczy w zbiorniku bazujący na PLC i HMI
Charakterystyka stanowiska, parametry
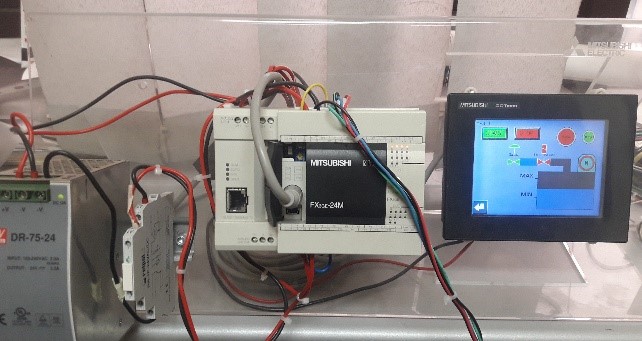
Stanowisko składa się z trzystanowego, pływakowego czujnika poziomu cieczy podłączonego do sterownika PLC. Wizualizacja aktualnego stanu realizowana jest na panelu operatorskim HMI. Układ uzupełnia przekaźnik, zasilacz i okablowanie. Dostępne oprogramowanie umożliwia opracowywanie sterowania między innymi w języku drabinkowym.Badania
Stanowisko pozwala na przeprowadzenie prób poprawności montażu i połączeń zarówno linii sygnałowych jak i zasilających. Udostępnione oprogramowanie umożliwia opracowanie programu kontrolno-sterującego na sterownik PLC, a także jego weryfikację i diagnostykę. Na panelu HMI realizowana jest wizualizacja wybranej strategii sterowania, która ma być zrozumiała i intuicyjna w obsłudze.Dydaktyka
Stanowisko wykorzystywane jest w ramach przedmiotu Komputerowa symulacja układów sterowania. W ramach zajęć dydaktycznych studenci mają możliwość zaznajomienia się z prawidłowymi zasadami podłączeń czujników z sterownikami PLC. W zależności od przyjętego scenariusza opracowują odpowiednią strategię sterowania i implementują ją do sterownika. Przygotowywana jest również wizualizacja aktualnego stanu układu. Opracowania realizowane są w małych zespołach co pozwala nauczyć studentów pracy zespołowej.System dźwigu z napędem hydraulicznym pośrednim
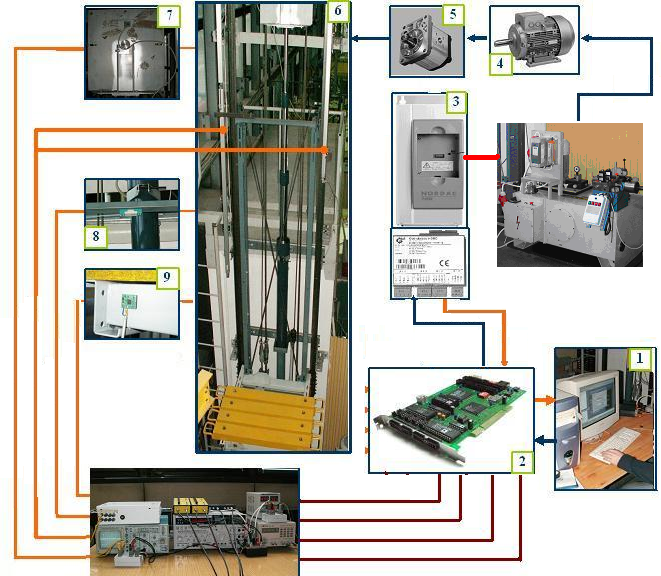
Charakterystyka stanowiska, parametry
Udźwig: Q = 400kg w GNP A2, wysokość podnoszenia H = 3,2 m, platforma kabinowa 1,20 x 1,20 m, napęd elektryczny 7,5 kW, zasilacz hydrauliczny, układ sterowania zmiana prędkości obrotowej silnika elektrycznego falownik z mikroprocesorowym sterownikiem mocy, system czujników pomiarowych, w tym do pomiaru przemieszczeń, a także akcelerometrów zintegrowanych.Badania
Zasadniczym celem zbudowanego dźwigu z pośrednim napędem hydraulicznym i układem sekwencyjno-adaptacyjnego sterowania jest pomiar oraz akwizycja danych doświadczalnych o własnościach dynamicznych układu zawierającego w swojej konfiguracji moduły o zmiennej strukturze i nieliniowych charakterystykach (system olinowania o zmiennej długości i układ hydrauliczny z trójstopniowym siłownikiem). Zespół napędowy dźwigu wyposażony jest w programowalny układ sterowania, który umożliwia wygodną w praktyce realizację wymagań w postaci zadanej przez komputer funkcji sterującej. Struktura badanego układu dźwigu może podlegać zakładanym zmianom w trakcie prowadzenia eksperymentów (symulacja stopnia wyeksploatowania wybranych podzespołów, przez np. powiększanie luzów pomiędzy ślizgaczami a prowadnicami, itp.). W układzie napędowo-sterującym dźwigu, dla potrzeb eksperymentu, istnieje możliwość wykorzystania sekwencyjnej techniki regulacji prędkości ruchu platformy (hydraulicznym blokiem zaworowym) lub płynnej regulacji (przemiennik częstotliwości).Dydaktyka
Stanowisko wykorzystywane jest w ramach przedmiotów: Sterowanie w Systemach Transportowych oraz Sterowanie maszyn i urządzeń transportowych. Celem jest zapoznanie studentów z budową dźwigów hydraulicznych oraz systemami do ich sterowania. Poznają oprogramowanie zaimplementowanego systemu adaptacyjnego sterowania, wyznaczają podstawowe parametry charakteryzujące przemieszczenie platformy roboczej, w tym współczynnik „jerk”, opracowują funkcje sterujące ruchem platformy dla wybranych zadań transportowych.Stanowisko suwnicy jednodźwigarowej podwieszonej

Charakterystyka stanowiska, parametry
Udźwig: Q = 250 kg w GNP A3, obszary pracy: eksploatacyjna długość toru jezdnego min. 18,5 m, rozpiętość L = 4,35 m, wysokość podnoszenia H = 3 m, prędkość podnoszenia dla systemu: podstawowa/dostawcza Vp = 8/2 m/min, sterowanie mechanizmami roboczymi z kasety z poziomu roboczego hali lub zdalnie z pilota radiowego, wciągnik łańcuchowy DKUN_2-250, dźwigar nośny suwnicy i torowisko jedne KBK, sterowanie radiowe HETRONIC, system akwizycji danych DACPad-6020E + czujniki tensometryczne + akcelerometry zintegrowane AD1-105+ filtry dolnoprzepustowe FAD-1.Badania
Stanowisko umożliwia poznanie zasad konstruowania współczesnych systemów transportu podwieszonego, przeprowadzenie prób ruchowych poszczególnymi mechanizmami suwnicy jednodźwigarowej oraz wyznaczenie parametrów eksploatacyjnych przy sterowaniu bezpośrednim oraz zdalnym, pomiar stanu naprężeń w dźwigarze elektrowciągnika i dźwigarach torowiska jezdnego, a także w elementach ustroju nośnego przy różnych kombinacjach obciążeń, wyznaczenie współczynnika dynamicznego podnoszenia przy podrywania ładunku podwieszonego na cięgnach sztywnych (trawersa stalowa) oraz podatnych (zawiesia z włókien poliestrowych), pomiar drgań dźwigara nośnego suwnicy dla różnych cykli równoczesnej pracy mechanizmu podnoszenia i jazdy wciągnika oraz pomiar strzałki ugięcia dźwigara, a także wychyleń ładunku podczas typowych cykli transportowych. W procesie pomiaru wykorzystywana jest technika DSP, w tym komputerowe systemy akwizycji danych programowane w środowisku LabView.Dydaktyka
Stanowisko wykorzystywane jest w ramach przedmiotów: Sterowanie w Systemach Transportowych oraz Sterowanie maszyn i urządzeń transportowych. Celem jest zapoznanie studentów z budową suwnic procesowych i układami do ich sterowania, współczesnymi systemami techniki pomiarowo-diagnostycznej dźwignic, a także systemami antywahaniowymi stosowanymi w technice dźwigowej (systemy antywahaniowe ACSL).Stanowisko układnicy magazynowej

Charakterystyka stanowiska, parametry
Układnica wykonana jest na bazie komponentów firmy DEMAG Cranes & Components. Ustrój nośny oraz układy robocze stanowią standardowe moduły KBK Classic, uzupełnione o elektromechaniczny zespół napędu ruchu obrotowego NORD, torowiskiem jezdnym jest układ profili podwieszonych do konstrukcji zadaszenia hali i eksploatowanych wspólnie z suwnicą typu podwieszonego. Podstawowe parametry układnicy to: udźwig – 250 [kg], wysokość podnoszenia – 3,8 [m], przejazd zespołu kolumny nośnej z obrotnicą wzdłuż dźwigarów mostu – 3,95[m], przejazd wzdłuż torowiska jezdnego hali – z ograniczeniem do 4,0 [m], obrót zespołu widłowego zabieraka palet – 360°. Układnica ta współpracuje z regałem magazynowy wysokiego składowania firmy META-Regalbau. Posiada on 12 stref składowania palet, w tym cztery poziomy składowania po trzy rzędy w zabudowie kątowej. Centralną jednostką sterowniczą układnicy jest sterownik swobodnie programowalny typu SAIA PCD3.M3330 oraz terminal operatorski VT580W. Przesył informacji pomiędzy sterownikiem a panelem operatorskim odbywa się zdalnie poprzez Ethernet. Do budowy procedur sterujących, dla sterowników PCD3 wykorzystywane są edytory programowe: Fupla oraz Graftec.Badania
Stanowisko umożliwia poznanie zasad konstruowania współczesnych systemów magazynów wysokiego składowania, w których zastosowano pełną automatyzację procesów roboczych. Współpraca zespołów napędowych i sterujących układnic odbywa się na wysokim poziomie ich integracji funkcjonalno-programowej. Kluczową rolę w/w integracji, odgrywa interpretacja sygnałów pochodzących z zewnętrznego otoczenia układnicy (np. czujników zajętości gniazd regałowych, położenia w przestrzeni, stref pracy), a także sygnałów z układów napędowych (np. obciążenie ładunkiem, prędkość jazdy, częstotliwość załączania napędów). Odpowiednia interpretacja zebranych sygnałów poprzez centralną jednostkę sterującą układnicą, a następnie porównanie ich z zaprogramowanymi algorytmami postępowania, posiada decydujący wpływ na sterowanie układami napędowymi. Ponadto zastosowanie cyfrowych kamer, czujników wizyjnych jak i zespołów wizyjnych, stwarza szerokie możliwości analizy pozyskiwanego z otoczenia obrazu. Daje to możliwość bieżącej analizy stanu zarówno w strefie regałowej, przeładunkowej jak i obszaru roboczego, po którym porusza się układnica.Dydaktyka
Stanowisko wykorzystywane jest w ramach przedmiotów: Sterowanie w Systemach Transportowych oraz Sterowanie maszyn i urządzeń transportowych. Celem jest zapoznanie studentów z budową systemów wysokiego składowania, logistyką procesów magazynowych, identyfikacji ładunków oraz środkami automatycznego sterowania przepływami ładunków. Poznają języki programowania FUPLA i GRAFTEC, opracowują procedury testujące funkcjonalność systemu zabezpieczeń, między innymi elektronicznych barier ochronnych strefę pracy układnicy magazynowej i układu przeciążeniowego, a także opracowują aplikacje programowo-testowe dla wybranych czynności magazynowo-przeładunkowych. Testy funkcjonalne opracowanych programów sprawdzane są na stanowisku dydaktycznym ze sterownikiem SAIA PCD3.M 5540.