
AUTOMATYZACJA LOGISTYCZNYCH SYSTEMÓW TRANSPORTOWYCH
Kierownik: dr inż. P. Pająk
W ramach oferowanej specjalności szczególną wagę przywiązuje się do wszechstronnego przygotowania absolwenta z zakresu budowy, konstrukcji, eksploatacji, diagnostyki, odnowy i napraw urządzeń technicznych na wybranych przykładach najnowszych systemów transportowo-dźwigowych i maszyn roboczych, gwarantując uniwersalne wykształcenie inżynierskie, pozwalające na szybką adaptację w trudnych uwarunkowaniach współczesnego rynku pracy. Zapewniamy pozyskanie specjalistycznej wiedzy z obszaru najnowszych technik komputerowego wspomagania projektowania, monitoringu i diagnostyki eksploatacyjnej oraz atestacyjnej maszyn, zarządzania i logistyki systemów transportu przemysłowego, a także automatyzacji, autodiagnostyki, sterowania i teleserwisowania. Kształcimy w zakresie znajomości specjalistycznych aplikacji programowych takich jak: AutoCAD, Solid Edge, Solid Works, Vissim, ACSL, Pro-Engineering, LabWindows, Working Model 2D, Visual Nastran 4D, Ansys, Simulink, LabView, Cosmos, Matlab, VTVIN, Saia PG5, Mathcad.
PRZEDMIOTY SPECJALNOŚCIOWE
- Sterowanie i monitoring w transporcie
- Transport liniowy
- Urządzenia dźwigowo - przeładunkowe
- Techniki Bezpieczeństwa Urządzeń Transportu Przemysłowego
- Inżynieria środowiska transportowego
- Podstawy projektowania urządzeń transportu bliskiego
- Techniki magazynowania
- Automatyzacja maszyn i urządzeń transportu bliskiego
- Eksploatacja urządzeń transportu bliskiego
STANOWISKA LABORATORYJNE
Hydrauliczna platforma dźwigowa z napędem pośrednim linowym
 Celem badań, realizowanych na stanowisku hydraulicznej platformy pionowej z pośrednim napędem linowym, jest uzyskanie informacji o własnościach dynamicznych układu roboczego (identyfikacja efektu szarpnięcia „jerku” w fazie rozruchu i hamowania podestu platformy), a także ocena możliwości skutecznego kształtowania tych własności poprzez sterowanie parametrami w module przemiennika częstotliwościowego silnika w zespole napędowym. W budowie stanowiska zastosowane zostały standardowe moduły i podzespoły dźwigowe. W hydraulicznym układzie napędowym wykorzystano między innymi trójstopniowy siłownik nurnikowy z wewnętrzną synchronizacją wysuwu poszczególnych członów.
Celem badań, realizowanych na stanowisku hydraulicznej platformy pionowej z pośrednim napędem linowym, jest uzyskanie informacji o własnościach dynamicznych układu roboczego (identyfikacja efektu szarpnięcia „jerku” w fazie rozruchu i hamowania podestu platformy), a także ocena możliwości skutecznego kształtowania tych własności poprzez sterowanie parametrami w module przemiennika częstotliwościowego silnika w zespole napędowym. W budowie stanowiska zastosowane zostały standardowe moduły i podzespoły dźwigowe. W hydraulicznym układzie napędowym wykorzystano między innymi trójstopniowy siłownik nurnikowy z wewnętrzną synchronizacją wysuwu poszczególnych członów.
Automatyczna układnica magazynowa
 Stanowisko pozwala na zapoznanie się z: podstawami budowy systemów magazynowania regałowego wyposażonego w układnice wysokiego składowania, automatyzacją pracy urządzeń z uwzględnieniem pozycjonowania i kontrolingu ich stanów, procedurami testowania funkcjonalności systemów zabezpieczeń w tym elektronicznych barier ochronnych stref pracy i układów przeciążeniowych. Ustrój nośny oraz układy robocze stanowią standardowe moduły KBK Classic Demag. Centralną jednostką sterowniczą układnicy jest sterownik swobodnie programowalny oraz terminal operatorski. W systemie pomiarowo-kontrolnym zastosowane zostały czujniki przemieszczeń kątowych, zbliżeniowe, kontroli zajętości stref regałowych, laserowe czujniki przemieszczeń liniowych, optyczne czujniki bariery ochronnej strefy pracy.
Stanowisko pozwala na zapoznanie się z: podstawami budowy systemów magazynowania regałowego wyposażonego w układnice wysokiego składowania, automatyzacją pracy urządzeń z uwzględnieniem pozycjonowania i kontrolingu ich stanów, procedurami testowania funkcjonalności systemów zabezpieczeń w tym elektronicznych barier ochronnych stref pracy i układów przeciążeniowych. Ustrój nośny oraz układy robocze stanowią standardowe moduły KBK Classic Demag. Centralną jednostką sterowniczą układnicy jest sterownik swobodnie programowalny oraz terminal operatorski. W systemie pomiarowo-kontrolnym zastosowane zostały czujniki przemieszczeń kątowych, zbliżeniowe, kontroli zajętości stref regałowych, laserowe czujniki przemieszczeń liniowych, optyczne czujniki bariery ochronnej strefy pracy.
Minikoparka
 Wykorzystanie minikoparki Caterpillar na zajęciach laboratoryjnych pozwala studentom na sprawdzenie się w roli operatora, a także zapoznanie się z podstawowymi właściwościami maszyny i hydraulicznego układu napędowego. Na koparce zamontowano kilkanaście typów czujników współpracujących między innymi ze sterownikiem PLC i panelem HMI. Na bazie tego oprzyrządowania opracowano systemy wspomagające pracę operatora takie jak np.: dynamiczny system ważący. Istnieje możliwość zaprojektowania kolejnych układów lub rozwijania już istniejących systemów w ramach prac koła naukowego czy podczas realizacji pracy dyplomowej.
Wykorzystanie minikoparki Caterpillar na zajęciach laboratoryjnych pozwala studentom na sprawdzenie się w roli operatora, a także zapoznanie się z podstawowymi właściwościami maszyny i hydraulicznego układu napędowego. Na koparce zamontowano kilkanaście typów czujników współpracujących między innymi ze sterownikiem PLC i panelem HMI. Na bazie tego oprzyrządowania opracowano systemy wspomagające pracę operatora takie jak np.: dynamiczny system ważący. Istnieje możliwość zaprojektowania kolejnych układów lub rozwijania już istniejących systemów w ramach prac koła naukowego czy podczas realizacji pracy dyplomowej.
PRZYKŁAD ZREALIZOWANEJ PRACY DYPLOMOWEJ
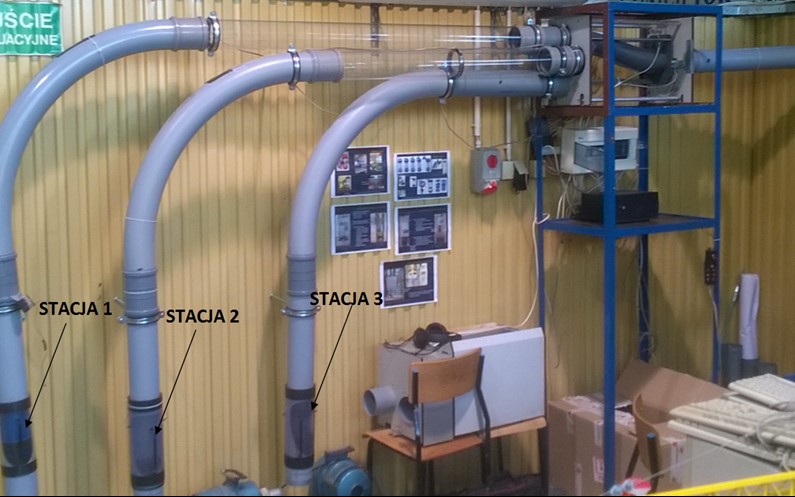 Budowa i badania laboratoryjnego modelu poczty pneumatycznej
Budowa i badania laboratoryjnego modelu poczty pneumatycznej
z autonomicznym systemem sterowania
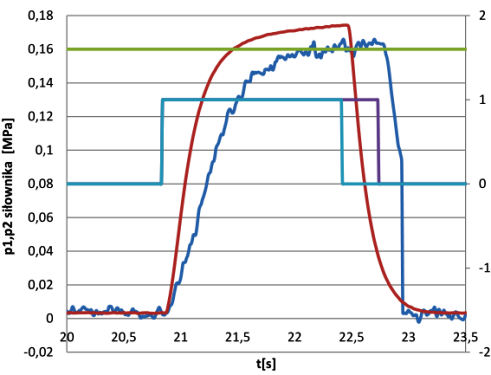
Praca zawiera projekt i wykonanie układu poczty pneumatycznej. Zastosowano autonomiczny system sterowania, oparty na sterowniku PLC. Po uruchomieniu układu zostały przeprowadzone badania wybranych elementów. Uzyskane w ramach niniejszego dyplomu informacje i wyniki badań zostały zaprezentowane w publikacjach naukowych.
WSPÓŁPRACUJEMY Z FIRMAMI
Urząd Dozoru Technicznego, Demag, Mota Engil, OTIS, Caterpillar, Bergerat Monnoyear, Delphi, MAN, Opel, Krakdźwig, Bumar Sauer Danfoss, Parker Hannifin, Ponar-Wadowice, Budostal S.A., Mostostal, Hydrokrak, Liugong Dressta Machinery, Pneumat System.
STEROWANIE I MONITORING MASZYN I URZĄDZEŃ
Kierownik: dr inż. A. Gawlik
Kształcenie na specjalności obejmuje zagadnienia: budowy i diagnostyki maszyn oraz modelowania z zastosowaniem technik komputerowych. Zarówno treści, jak i zakres przedmiotów specjalnościowych uwzględniają fakt, że istotnym elementem nowoczesnego wykształcenia jest obecnie możliwość profesjonalnego korzystania ze współczesnych narzędzi komputerowego zapisu konstrukcji, analizy i syntezy ruchu oraz multimedialnych systemów przekazu informacji. Szczególnie projektowanie maszyn oraz układów sterowania i automatyzacji, jak również obsługa badań i diagnozowania maszyn są obecnie zdominowane przez technikę cyfrową. Stąd na specjalności "Sterowanie i Monitoring Maszyn i Urządzeń" szczególną wagę przywiązuje się do stosowania nowoczesnych programów i systemów CAD w procesie edukacji, mając na uwadze zastosowanie zdobytych umiejętności w przyszłej pracy zawodowej. Specjalność dając wysokie wykształcenie inżynierskie, stanowi dobre przygotowanie w zakresie technik komputerowych w aspekcie potrzeb przemysłu. Tworzymy aplikacje z użyciem następujacych programów: diagnostyka i symulacja - Matlab/Simulink, LabView, AutomationStudio, MADe, MSC. Visual Nastran 4D, SimulationX, Working Model, Vissim; programowanie PLC i CNC - PLUS+1 Guide, Proficy Machine Edition, Simatic, Sinumeric, GX Works, VisiLogic; wizualizacja oraz kontrola - InTouch; modelowanie CAD 3D - Autodesk Inventor, Catia, Pro/Engineer, PumpLinx, SolidWorks, SolidEdge.
PRZEDMIOTY SPECJALNOŚCIOWE
- Podstawy diagnostyki i monitoringu maszyn</strong
- Programowalne systemy sterowania maszyn
- Sterowanie maszyn i urządzeń transportowych
- Podstawy systemów zdalnego sterowania
PRZYKŁADOWE STANOWISKA LABORATORYJNE
Laboratorium Napędów i Sterowania Hydraulicznego i Pneumatycznego
 |
 |
Zapoznanie z elementami, budową, montażem i zasadą działania pneumatycznych i hydraulicznych układów napędowych maszyn i urządzeń z uwzględnieniem parametrów ich pracy oraz sposobów sterowania.
PRZYKŁAD ZREALIZOWANEJ PRACY DYPLOMOWEJ
Układ sterowania silnikiem pneumatycznym
|
|
|
|

Celem pracy dyplomowej było opracowanie i przetestowanie układu sterowania silnikiem pneumatycznym zbudowanym z trzech siłowników dwustronnego działania. Aby zrealizować to zadanie celowym było zapoznanie się z budową i zasadą działania elementów pneumatycznych oraz elektronicznych. Poznanie środowiska programu MATLAB Simulink ułatwiło opracowanie algorytmu sterowania, w którym operowano zmiennymi pozwalającymi na uzyskanie wyższej wartości mocy oraz bardziej liniowej charakterystyki momentu. Zmiennymi była martwa strefa zasilania siłownika oraz kąt wyprzedzenia zasilania cewkami zaworów sterujących. Ciśnienie zasilające było ustawiane przy pomocy układu przygotowania powietrza.
WSPÓŁPRACA Z PRZYKŁADOWYMI FIRMAMI
|
Astor Kraków
BOS Automotive Products Polska Tychy
Bosch-Rexroth Warszawa Caterpillar USA/UK Danfoss Wrocław |
Delhpi Poland Oddział Kraków
Parker Hannifin Warszawa
Philip Morris Polska Kraków Radioster Katowice Sabur Warszawa/Katowice |